|
|
@@ -4,129 +4,187 @@
|
|
|
\usepackage{hyperref}
|
|
|
\usepackage{graphicx}
|
|
|
|
|
|
-\title{Using local binary patterns to read license plates in photographs}
|
|
|
-
|
|
|
-% Paragraph indentation
|
|
|
+% Document properties
|
|
|
\setlength{\parindent}{0pt}
|
|
|
\setlength{\parskip}{1ex plus 0.5ex minus 0.2ex}
|
|
|
-
|
|
|
+\date{\today}
|
|
|
+\title{Using local binary patterns to read license plates in photographs}
|
|
|
+\author{
|
|
|
+ Gijs van der Voort\\
|
|
|
+ Richard Torenvliet\\
|
|
|
+ Jayke Meijer\\
|
|
|
+ Tadde\"us Kroes\\
|
|
|
+ Fabi\"en Tesselaar
|
|
|
+}
|
|
|
+
|
|
|
+% Front page / toc
|
|
|
\begin{document}
|
|
|
\maketitle
|
|
|
-
|
|
|
-\section*{Project members}
|
|
|
-Gijs van der Voort\\
|
|
|
-Richard Torenvliet\\
|
|
|
-Jayke Meijer\\
|
|
|
-Tadde\"us Kroes\\
|
|
|
-Fabi\'en Tesselaar
|
|
|
-
|
|
|
+\thispagestyle{empty}
|
|
|
+\newpage
|
|
|
\tableofcontents
|
|
|
-\pagebreak
|
|
|
+\newpage
|
|
|
|
|
|
-\setcounter{secnumdepth}{1}
|
|
|
|
|
|
\section{Problem description}
|
|
|
|
|
|
-License plates are used for uniquely identifying motorized vehicles and are
|
|
|
-made to be read by humans from great distances and in all kinds of weather
|
|
|
+License plates are used for uniquely identifying motorized vehicles and are made
|
|
|
+to be read by humans from great distances and in all kinds of weather
|
|
|
conditions.
|
|
|
|
|
|
Reading license plates with a computer is much more difficult. Our dataset
|
|
|
contains photographs of license plates from various angles and distances. This
|
|
|
means that not only do we have to implement a method to read the actual
|
|
|
characters, but given the location of the license plate and each individual
|
|
|
-character, we must make sure we transform each character to a standard form.
|
|
|
+character, we must make sure we transform each character to a standard form.
|
|
|
This has to be done or else the local binary patterns will never match!
|
|
|
|
|
|
Determining what character we are looking at will be done by using Local Binary
|
|
|
Patterns. The main goal of our research is finding out how effective LBP's are
|
|
|
in classifying characters on a license plate.
|
|
|
|
|
|
-In short our program must be able to do the following:
|
|
|
+
|
|
|
+\section{The process}
|
|
|
+
|
|
|
+The process with which we extract license places from photographs consists of
|
|
|
+multiple steps listed below. All these steps will be explained in detail further
|
|
|
+on in this report.
|
|
|
|
|
|
\begin{enumerate}
|
|
|
- \item Extracting characters using the location points in the xml file.
|
|
|
- \item Reduce noise where possible to ensure maximum readability.
|
|
|
- \item Transforming a character to a normal form.
|
|
|
- \item Creating a local binary pattern histogram vector.
|
|
|
- \item Matching the found vector with a learning set.
|
|
|
- \item And finally it has to check results with a real data set.
|
|
|
+ \item Extract character images from a license plate photograph using the
|
|
|
+ location points in the XML files from our dataset.
|
|
|
+ \item Reduce the noise in a character image using a Gaussian filter.
|
|
|
+ \item Transforming a character image to a normal form.
|
|
|
+ \item Create a LBP histogram vector for a character image.
|
|
|
+ \item Match the a feature vector with a learning set using a SVM.
|
|
|
+ \item Verify the match given by the SVM against our dataset.
|
|
|
\end{enumerate}
|
|
|
|
|
|
-\section{Language of choice}
|
|
|
|
|
|
-The actual purpose of this project is to check if LBP is capable of recognizing
|
|
|
-license plate characters. We knew the LBP implementation would be pretty
|
|
|
-simple. Thus an advantage had to be its speed compared with other license plate
|
|
|
-recognition implementations, but the uncertainty of whether we could get some
|
|
|
-results made us pick Python. We felt Python would not restrict us as much in
|
|
|
-assigning tasks to each member of the group. In addition, when using the
|
|
|
-correct modules to handle images, Python can be decent in speed.
|
|
|
+\section{The dataset}
|
|
|
+
|
|
|
+The dataset consists of photographs of license plates from various angles and
|
|
|
+distances. The photographs are all 8-bit gray-scale JPEG images. With every
|
|
|
+photograph there is a .info file. These files, consisting of XML data, contain
|
|
|
+information about the photographed license plate like the country, information
|
|
|
+about the image, the location of the license plate and the location of the
|
|
|
+characters in the license plate.
|
|
|
+
|
|
|
|
|
|
\section{Implementation}
|
|
|
|
|
|
-Now we know what our program has to be capable of, we can start with the
|
|
|
-implementations.
|
|
|
|
|
|
-\subsection{Extracting a letter}
|
|
|
+\subsection{Used programming language}
|
|
|
+
|
|
|
+Although the actual purpose of this research is to see if LBP is capable of
|
|
|
+recognizing license plate characters. We know that LBP is a fast algorithm thus
|
|
|
+an advantage had to be its speed compared with other license plate recognition
|
|
|
+implementations. The uncertainty of whether LBP's could get some results made us
|
|
|
+pick Python.
|
|
|
+
|
|
|
+Python is a very flexible programming language: there are a lot of existing
|
|
|
+modules and frameworks most of which are made in C, the higher order of the
|
|
|
+language makes programming applications quick and because it is fairly easy to
|
|
|
+transform a python module to a C based module, our system could be easily
|
|
|
+converted to a faster C implementation if our results are positive.
|
|
|
+
|
|
|
+
|
|
|
+\subsection{Character extraction}
|
|
|
+
|
|
|
+
|
|
|
+\subsubsection{Reading the INFO file}
|
|
|
+
|
|
|
+The XML reader will return a 'license plate' object when given an XML file. The
|
|
|
+license plate holds a list of, up to six, NormalizedImage characters and from
|
|
|
+which country the plate is from. The reader is currently assuming the XML file
|
|
|
+and image name are corresponding. Since this was the case for the given dataset.
|
|
|
+This can easily be adjusted if required.
|
|
|
+
|
|
|
+To parse the XML file, the minidom module is used. So the XML file can be
|
|
|
+treated as a tree, where one can search for certain nodes. In each XML file it
|
|
|
+is possible that multiple versions exist, so the first thing the reader will do
|
|
|
+is retrieve the current and most up-to-date version of the plate. The reader
|
|
|
+will only get results from this version.
|
|
|
+
|
|
|
+Now we are only interested in the individual characters so we can skip the
|
|
|
+location of the entire license plate. Each character has a single character
|
|
|
+value, indicating what someone thought what the letter or digit was and four
|
|
|
+coordinates to create a bounding box. To make things not to complicated a
|
|
|
+Character class and Point class are used. They act pretty much as associative
|
|
|
+lists, but it gives extra freedom on using the data. If less then four points
|
|
|
+have been set the character will not be saved.
|
|
|
+
|
|
|
+When four points have been gathered the data from the actual image is being
|
|
|
+requested. For each corner a small margin is added (around 3 pixels) so that no
|
|
|
+features will be lost and minimum amounts of new features will be introduced by
|
|
|
+noise in the margin.
|
|
|
+
|
|
|
+In the next section you can read more about the perspective transformation that
|
|
|
+is being done. After the transformation the character can be saved: Converted to
|
|
|
+gray-scale, but nothing further. This was used to create a learning set. If it
|
|
|
+does not need to be saved as an actual image it will be converted to a
|
|
|
+NormalizedImage. When these actions have been completed for each character the
|
|
|
+license plate is usable in the rest of the code.
|
|
|
|
|
|
-Rewrite this section once we have implemented this properly.
|
|
|
-%NO LONGER VALID!
|
|
|
-%Because we are already given the locations of the characters, we only need to
|
|
|
-%transform those locations using the same perspective transformation used to
|
|
|
-%create a front facing license plate. The next step is to transform the
|
|
|
-%characters to a normalized manner. The size of the letter W is used as a
|
|
|
-%standard to normalize the width of all the characters, because W is the widest
|
|
|
-%character of the alphabet. We plan to also normalize the height of characters,
|
|
|
-%the best manner for this is still to be determined.
|
|
|
|
|
|
-%\begin{enumerate}
|
|
|
-% \item Crop the image in such a way that the character precisely fits the
|
|
|
-% image.
|
|
|
-% \item Scale the image to a standard height.
|
|
|
-% \item Extend the image on either the left or right side to a certain width.
|
|
|
-%\end{enumerate}
|
|
|
+\subsubsection{Perspective transformation}
|
|
|
|
|
|
-%The resulting image will always have the same size, the character contained
|
|
|
-%will always be of the same height, and the character will always be positioned
|
|
|
-%at either the left of right side of the image.
|
|
|
+Once we retrieved the corner points of the character, we feed those to a module
|
|
|
+that extracts the (warped) character from the original image, and creates a new
|
|
|
+image where the character is cut out, and is transformed to a rectangle.
|
|
|
|
|
|
-\subsection{Transformation}
|
|
|
|
|
|
-A simple perspective transformation will be sufficient to transform and resize
|
|
|
-the characters to a normalized format. The corner positions of characters in the
|
|
|
-dataset are supplied together with the dataset.
|
|
|
|
|
|
-\subsection{Reducing noise}
|
|
|
+\subsection{Noise reduction}
|
|
|
|
|
|
Small amounts of noise will probably be suppressed by usage of a Gaussian
|
|
|
filter. A real problem occurs in very dirty license plates, where branches and
|
|
|
dirt over a letter could radically change the local binary pattern. A question
|
|
|
we can ask ourselves here, is whether we want to concentrate ourselves on these
|
|
|
exceptional cases. By law, license plates have to be readable. However, the
|
|
|
-provided dataset showed that this does not means they always are. We will have
|
|
|
-to see how the algorithm performs on these plates, however we have good hopes
|
|
|
-that our method will get a good score on dirty plates, as long as a big enough
|
|
|
-part of the license plate remains readable.
|
|
|
-
|
|
|
-\subsection{Local binary patterns}
|
|
|
-Once we have separate digits and characters, we intent to use Local Binary
|
|
|
-Patterns (Ojala, Pietikäinen \& Harwood, 1994) to determine what character
|
|
|
-or digit we are dealing with. Local Binary
|
|
|
-Patterns are a way to classify a texture based on the distribution of edge
|
|
|
-directions in the image. Since letters on a license plate consist mainly of
|
|
|
-straight lines and simple curves, LBP should be suited to identify these.
|
|
|
-
|
|
|
-\subsubsection{LBP Algorithm}
|
|
|
-The LBP algorithm that we implemented is a square variant of LBP, the same
|
|
|
-that is introduced by Ojala et al (1994). Wikipedia presents a different
|
|
|
-form where the pattern is circular.
|
|
|
+provided dataset showed that this does not means they always are.
|
|
|
+
|
|
|
+
|
|
|
+\subsubsection{Camera noise and small amounts of dirt}
|
|
|
+
|
|
|
+The dirt on the license plate can be of different sizes. We can reduce the
|
|
|
+smaller amounts of dirt in the same way as we reduce normal noise, by applying a
|
|
|
+Gaussian blur to the image. This is the next step in our program.
|
|
|
+
|
|
|
+The Gaussian filter we use comes from the \texttt{scipy.ndimage} module. We use
|
|
|
+this function instead of our own function, because the standard functions are
|
|
|
+most likely more optimized then our own implementation, and speed is an
|
|
|
+important factor in this application.
|
|
|
+
|
|
|
+
|
|
|
+\subsubsection{Larger amounts of dirt}
|
|
|
+
|
|
|
+Larger amounts of dirt are not going to be resolved by using a Gaussian filter.
|
|
|
+We rely on one of the characteristics of the Local Binary Pattern, only looking
|
|
|
+at the difference between two pixels, to take care of these problems.\\ Because
|
|
|
+there will probably always be a difference between the characters and the dirt,
|
|
|
+and the fact that the characters are very black, the shape of the characters
|
|
|
+will still be conserved in the LBP, even if there is dirt surrounding the
|
|
|
+character.
|
|
|
+
|
|
|
+
|
|
|
+\subsection{Building a feature vector}
|
|
|
+
|
|
|
+
|
|
|
+\subsubsection{Creating LBP's}
|
|
|
+
|
|
|
+The LBP algorithm that we implemented is a square variant of LBP, the same that
|
|
|
+is introduced by Ojala et al (1994). Wikipedia presents a different form where
|
|
|
+the pattern is circular.
|
|
|
+
|
|
|
\begin{itemize}
|
|
|
+
|
|
|
\item Determine the size of the square where the local patterns are being
|
|
|
-registered. For explanation purposes let the square be 3 x 3. \\
|
|
|
-\item The grayscale value of the middle pixel is used as threshold. Every
|
|
|
-value of the pixel around the middle pixel is evaluated. If it's value is
|
|
|
-greater than the threshold it will be become a one else a zero.
|
|
|
+registered. For explanation purposes let the square be 3 x 3.
|
|
|
+
|
|
|
+\item The gray-scale value of the middle pixel is used as threshold. Every value
|
|
|
+of the pixel around the middle pixel is evaluated. If it's value is greater than
|
|
|
+the threshold it will be become a one else a zero.
|
|
|
|
|
|
\begin{figure}[h!]
|
|
|
\center
|
|
|
@@ -135,14 +193,15 @@ greater than the threshold it will be become a one else a zero.
|
|
|
\end{figure}
|
|
|
|
|
|
Notice that the pattern will be come of the form 01001110. This is done when a
|
|
|
-the value of the evaluated pixel is greater than the threshold, shift the bit
|
|
|
-by the n(with i=i$_{th}$ pixel evaluated, starting with $i=0$).
|
|
|
+the value of the evaluated pixel is greater than the threshold, shift the bit by
|
|
|
+the n(with i=i$_{th}$ pixel evaluated, starting with $i=0$).
|
|
|
|
|
|
This results in a mathematical expression:
|
|
|
|
|
|
-Let I($x_i, y_i$) an Image with grayscale values and $g_n$ the grayscale value
|
|
|
-of the pixel $(x_i, y_i)$. Also let $s(g_i, g_c)$ (see below) with $g_c$ = grayscale value
|
|
|
-of the center pixel and $g_i$ the grayscale value of the pixel to be evaluated.
|
|
|
+Let I($x_i, y_i$) an Image with gray-scale values and $g_n$ the gray-scale value
|
|
|
+of the pixel $(x_i, y_i)$. Also let $s(g_i, g_c)$ (see below) with $g_c$ =
|
|
|
+gray-scale value of the center pixel and $g_i$ the gray-scale value of the pixel
|
|
|
+to be evaluated.
|
|
|
|
|
|
$$
|
|
|
s(g_i, g_c) = \left\{
|
|
|
@@ -158,7 +217,7 @@ The outcome of this operations will be a binary pattern.
|
|
|
|
|
|
\item Given this pattern, the next step is to divide the pattern in cells. The
|
|
|
amount of cells depends on the quality of the result, so trial and error is in
|
|
|
-order. Starting with dividing the pattern in to cells of size 16.
|
|
|
+order. Starting with dividing the pattern in to cells of size 16.
|
|
|
|
|
|
\item Compute a histogram for each cell.
|
|
|
|
|
|
@@ -171,153 +230,80 @@ order. Starting with dividing the pattern in to cells of size 16.
|
|
|
\item Consider every histogram as a vector element and concatenate these. The
|
|
|
result is a feature vector of the image.
|
|
|
|
|
|
-\item Feed these vectors to a support vector machine. This will ''learn'' which
|
|
|
-vector indicates what vector is which character.
|
|
|
+\item Feed these vectors to a support vector machine. This will 'learn' which
|
|
|
+vector indicates what vector is which character.
|
|
|
|
|
|
\end{itemize}
|
|
|
|
|
|
-To our knowledge, LBP has yet not been used in this manner before. Therefore,
|
|
|
-it will be the first thing to implement, to see if it lives up to the
|
|
|
-expectations. When the proof of concept is there, it can be used in a final
|
|
|
-program.
|
|
|
-
|
|
|
-Later we will show that taking a histogram over the entire image (basically
|
|
|
-working with just one cell) gives us the best results.
|
|
|
-
|
|
|
-\subsection{Matching the database}
|
|
|
-
|
|
|
-Given the LBP of a character, a Support Vector Machine can be used to classify
|
|
|
-the character to a character in a learning set. The SVM uses a concatenation
|
|
|
-of each cell in an image as a feature vector (in the case we check the entire
|
|
|
-image no concatenation has to be done of course. The SVM can be trained with a
|
|
|
-subset of the given dataset called the ''Learning set''. Once trained, the
|
|
|
-entire classifier can be saved as a Pickle object\footnote{See
|
|
|
-\url{http://docs.python.org/library/pickle.html}} for later usage.
|
|
|
-
|
|
|
-\section{Implementation}
|
|
|
-
|
|
|
-In this section we will describe our implementations in more detail, explaining
|
|
|
-choices we made.
|
|
|
-
|
|
|
-\subsection{Character retrieval}
|
|
|
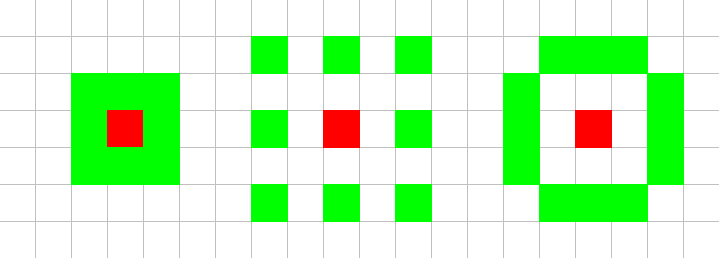
+\begin{figure}[h!]
|
|
|
+\center
|
|
|
+\includegraphics[scale=0.5]{neighbourhoods.png}
|
|
|
+\caption{Tested neighborhoods}
|
|
|
+\end{figure}
|
|
|
|
|
|
-In order to retrieve the characters from the entire image, we need to
|
|
|
-perform a perspective transformation. However, to do this, we need to know the
|
|
|
-coordinates of the four corners of each character. For our dataset, this is
|
|
|
-stored in XML files. So, the first step is to read these XML files.
|
|
|
+We have tried the neighborhoods as showed in figure 3. We chose these
|
|
|
+neighborhoods to prevent having to use interpolation, which would add a
|
|
|
+computational step, thus making the code execute slower. In the next section we
|
|
|
+will describe what the best neighborhood was.
|
|
|
|
|
|
-\paragraph*{XML reader}
|
|
|
+Take an example where the full square can be evaluated, there are cases where
|
|
|
+the neighbors are out of bounds. The first to be checked is the pixel in the
|
|
|
+left bottom corner in the square 3 x 3, with coordinate $(x - 1, y - 1)$ with
|
|
|
+$g_c$ as center pixel that has coordinates $(x, y)$. If the gray-scale value of
|
|
|
+the neighbor in the left corner is greater than the gray-scale value of the
|
|
|
+center pixel than return true. Bit-shift the first bit with 7. The outcome is
|
|
|
+now 1000000. The second neighbor will be bit-shifted with 6, and so on. Until we
|
|
|
+are at 0. The result is a binary pattern of the local point just evaluated. Now
|
|
|
+only the edge pixels are a problem, but a simple check if the location of the
|
|
|
+neighbor is still in the image can resolve this. We simply return false if it
|
|
|
+is.
|
|
|
|
|
|
-The XML reader will return a 'license plate' object when given an XML file. The
|
|
|
-licence plate holds a list of, up to six, NormalizedImage characters and from
|
|
|
-which country the plate is from. The reader is currently assuming the XML file
|
|
|
-and image name are corresponding. Since this was the case for the given
|
|
|
-dataset. This can easily be adjusted if required.
|
|
|
|
|
|
-To parse the XML file, the minidom module is used. So the XML file can be
|
|
|
-treated as a tree, where one can search for certain nodes. In each XML
|
|
|
-file it is possible that multiple versions exist, so the first thing the reader
|
|
|
-will do is retrieve the current and most up-to-date version of the plate. The
|
|
|
-reader will only get results from this version.
|
|
|
-
|
|
|
-Now we are only interested in the individual characters so we can skip the
|
|
|
-location of the entire license plate. Each character has
|
|
|
-a single character value, indicating what someone thought what the letter or
|
|
|
-digit was and four coordinates to create a bounding box. To make things not to
|
|
|
-complicated a Character class and Point class are used. They
|
|
|
-act pretty much as associative lists, but it gives extra freedom on using the
|
|
|
-data. If less then four points have been set the character will not be saved.
|
|
|
-
|
|
|
-When four points have been gathered the data from the actual image is being
|
|
|
-requested. For each corner a small margin is added (around 3 pixels) so that no
|
|
|
-features will be lost and minimum amounts of new features will be introduced by
|
|
|
-noise in the margin.
|
|
|
+\subsubsection{Creating histograms and the feature vector}
|
|
|
|
|
|
-In the next section you can read more about the perspective transformation that
|
|
|
-is being done. After the transformation the character can be saved: Converted
|
|
|
-to grayscale, but nothing further. This was used to create a learning set. If
|
|
|
-it doesn't need to be saved as an actual image it will be converted to a
|
|
|
-NormalizedImage. When these actions have been completed for each character the
|
|
|
-license plate is usable in the rest of the code.
|
|
|
+After all the Local Binary Patterns are created for every pixel. This pattern is
|
|
|
+divided in to cells. The feature vector is the vector of concatenated
|
|
|
+histograms. These histograms are created for cells. These cells are created by
|
|
|
+dividing the \textbf{pattern} in to cells and create a histogram of that. So
|
|
|
+multiple cells are related to one histogram. All the histograms are concatenated
|
|
|
+and fed to the SVM that will be discussed in the next section, Classification.
|
|
|
+We did however find out that the use of several cells was not increasing our
|
|
|
+performance, so we only have one histogram to feed to the SVM.
|
|
|
|
|
|
-\paragraph*{Perspective transformation}
|
|
|
-Once we retrieved the cornerpoints of the character, we feed those to a
|
|
|
-module that extracts the (warped) character from the original image, and
|
|
|
-creates a new image where the character is cut out, and is transformed to a
|
|
|
-rectangle.
|
|
|
|
|
|
-\subsection{Noise reduction}
|
|
|
+\subsection{Matching the database}
|
|
|
|
|
|
-The image contains a lot of noise, both from camera errors due to dark noise
|
|
|
-etc., as from dirt on the license plate. In this case, noise therefore means
|
|
|
-any unwanted difference in color from the surrounding pixels.
|
|
|
+Given the LBP of a character, a Support Vector Machine can be used to classify
|
|
|
+the character to a character in a learning set. The SVM uses a concatenation of
|
|
|
+each cell in an image as a feature vector (in the case we check the entire image
|
|
|
+no concatenation has to be done of course. The SVM can be trained with a subset
|
|
|
+of the given dataset called the Learning set. Once trained, the entire
|
|
|
+classifier can be saved as a Pickle object\footnote{See
|
|
|
+\url{http://docs.python.org/library/pickle.html}} for later usage.
|
|
|
|
|
|
-\paragraph*{Camera noise and small amounts of dirt}
|
|
|
-The dirt on the license plate can be of different sizes. We can reduce the
|
|
|
-smaller amounts of dirt in the same way as we reduce normal noise, by applying
|
|
|
-a Gaussian blur to the image. This is the next step in our program.\\
|
|
|
-\\
|
|
|
-The Gaussian filter we use comes from the \texttt{scipy.ndimage} module. We use
|
|
|
-this function instead of our own function, because the standard functions are
|
|
|
-most likely more optimized then our own implementation, and speed is an
|
|
|
-important factor in this application.
|
|
|
|
|
|
-\paragraph*{Larger amounts of dirt}
|
|
|
-Larger amounts of dirt are not going to be resolved by using a Gaussian filter.
|
|
|
-We rely on one of the characteristics of the Local Binary Pattern, only looking
|
|
|
-at the difference between two pixels, to take care of these problems.\\
|
|
|
-Because there will probably always be a difference between the characters and
|
|
|
-the dirt, and the fact that the characters are very black, the shape of the
|
|
|
-characters will still be conserved in the LBP, even if there is dirt
|
|
|
-surrounding the character.
|
|
|
-
|
|
|
-\subsection{Creating Local Binary Patterns and feature vector}
|
|
|
-Every pixel is a center pixel and it is also a value to evaluate but not at the
|
|
|
-same time. Every pixel is evaluated as shown in the explanation
|
|
|
-of the LBP algorithm. The 8 neighbours around that pixel are evaluated, of course
|
|
|
-this area can be bigger, but looking at the closes neighbours can give us more
|
|
|
-information about the patterns of a character than looking at neighbours
|
|
|
-further away. This form is the generic form of LBP, no interpolation is needed
|
|
|
-the pixels adressed as neighbours are indeed pixels.
|
|
|
-
|
|
|
-Take an example where the
|
|
|
-full square can be evaluated, there are cases where the neighbours are out of
|
|
|
-bounds. The first to be checked is the pixel in the left
|
|
|
-bottom corner in the square 3 x 3, with coordinate $(x - 1, y - 1)$ with $g_c$
|
|
|
-as center pixel that has coordinates $(x, y)$. If the grayscale value of the
|
|
|
-neighbour in the left corner is greater than the grayscale
|
|
|
-value of the center pixel than return true. Bitshift the first bit with 7. The
|
|
|
-outcome is now 1000000. The second neighbour will be bitshifted with 6, and so
|
|
|
-on. Until we are at 0. The result is a binary pattern of the local point just
|
|
|
-evaluated.
|
|
|
-Now only the edge pixels are a problem, but a simpel check if the location of
|
|
|
-the neighbour is still in the image can resolve this. We simply return false if
|
|
|
-it is.
|
|
|
-
|
|
|
-\subsection{Classification}
|
|
|
-
|
|
|
-
|
|
|
-
|
|
|
-\section{Finding parameters}
|
|
|
+\section{Determining optimal parameters}
|
|
|
|
|
|
Now that we have a functioning system, we need to tune it to work properly for
|
|
|
-license plates. This means we need to find the parameters. Throughout the
|
|
|
+license plates. This means we need to find the parameters. Throughout the
|
|
|
program we have a number of parameters for which no standard choice is
|
|
|
-available. These parameters are:\\
|
|
|
-\\
|
|
|
+available. These parameters are:
|
|
|
+
|
|
|
\begin{tabular}{l|l}
|
|
|
- Parameter & Description\\
|
|
|
- \hline
|
|
|
- $\sigma$ & The size of the Gaussian blur.\\
|
|
|
- \emph{cell size} & The size of a cell for which a histogram of LBPs will
|
|
|
- be generated.\\
|
|
|
- $\gamma$ & Parameter for the Radial kernel used in the SVM.\\
|
|
|
- $c$ & The soft margin of the SVM. Allows how much training
|
|
|
- errors are accepted.
|
|
|
-\end{tabular}\\
|
|
|
-\\
|
|
|
-For each of these parameters, we will describe how we searched for a good
|
|
|
-value, and what value we decided on.
|
|
|
+ Parameter & Description\\
|
|
|
+ \hline
|
|
|
+ $\sigma$ & The size of the Gaussian blur.\\
|
|
|
+ \emph{cell size} & The size of a cell for which a histogram of LBP's
|
|
|
+ will be generated.\\
|
|
|
+ \emph{Neighborhood}& The neighborhood to use for creating the LBP.\\
|
|
|
+ $\gamma$ & Parameter for the Radial kernel used in the SVM.\\
|
|
|
+ $c$ & The soft margin of the SVM. Allows how much training
|
|
|
+ errors are accepted.\\
|
|
|
+\end{tabular}
|
|
|
+
|
|
|
+For each of these parameters, we will describe how we searched for a good value,
|
|
|
+and what value we decided on.
|
|
|
+
|
|
|
|
|
|
\subsection{Parameter $\sigma$}
|
|
|
|
|
|
@@ -326,22 +312,38 @@ find this parameter, we tested a few values, by checking visually what value
|
|
|
removed most noise out of the image, while keeping the edges sharp enough to
|
|
|
work with. It turned out the best value is $\sigma = 0.5$.
|
|
|
|
|
|
+
|
|
|
\subsection{Parameter \emph{cell size}}
|
|
|
|
|
|
The cell size of the Local Binary Patterns determines over what region a
|
|
|
histogram is made. The trade-off here is that a bigger cell size makes the
|
|
|
classification less affected by relative movement of a character compared to
|
|
|
those in the learning set, since the important structure will be more likely to
|
|
|
-remain in the same cell. However, if the cell size is too big, there will not
|
|
|
-be enough cells to properly describe the different areas of the character, and
|
|
|
-the feature vectors will not have enough elements.\\
|
|
|
-\\
|
|
|
+remain in the same cell. However, if the cell size is too big, there will not be
|
|
|
+enough cells to properly describe the different areas of the character, and the
|
|
|
+feature vectors will not have enough elements.
|
|
|
+
|
|
|
In order to find this parameter, we used a trial-and-error technique on a few
|
|
|
cell sizes. During this testing, we discovered that a lot better score was
|
|
|
-reached when we take the histogram over the entire image, so with a single
|
|
|
-cell. therefor, we decided to work without cells.
|
|
|
+reached when we take the histogram over the entire image, so with a single cell.
|
|
|
+Therefore, we decided to work without cells.
|
|
|
+
|
|
|
+The reason that using one cell works best is probably because the size of a
|
|
|
+single character on a license plate in the provided dataset is very small. That
|
|
|
+means that when dividing it into cells, these cells become simply too small to
|
|
|
+have a really representative histogram. Therefore, the concatenated histograms
|
|
|
+are then a list of only very small numbers, which are not significant enough to
|
|
|
+allow for reliable classification.
|
|
|
+
|
|
|
+
|
|
|
+\subsection{Parameter \emph{Neighborhood}}
|
|
|
+
|
|
|
+The neighborhood to use can only be determined through testing. We did a test
|
|
|
+with each of these neighborhoods, and we found that the best results were
|
|
|
+reached with the following neighborhood, which we will call the ()-neighborhood.
|
|
|
+
|
|
|
|
|
|
-\subsection{Parameters $\gamma$ \& $c$}
|
|
|
+\subsection{Parameter $\gamma$ \& $c$}
|
|
|
|
|
|
The parameters $\gamma$ and $c$ are used for the SVM. $c$ is a standard
|
|
|
parameter for each type of SVM, called the 'soft margin'. This indicates how
|
|
|
@@ -349,24 +351,23 @@ exact each element in the learning set should be taken. A large soft margin
|
|
|
means that an element in the learning set that accidentally has a completely
|
|
|
different feature vector than expected, due to noise for example, is not taken
|
|
|
into account. If the soft margin is very small, then almost all vectors will be
|
|
|
-taken into account, unless they differ extreme amounts.\\
|
|
|
+taken into account, unless they differ extreme amounts.
|
|
|
+
|
|
|
$\gamma$ is a variable that determines the size of the radial kernel, and as
|
|
|
-such blablabla.\\
|
|
|
-\\
|
|
|
+such determines how steep the difference between two classes can be.
|
|
|
+
|
|
|
Since these parameters both influence the SVM, we need to find the best
|
|
|
-combination of values. To do this, we perform a so-called grid-search. A
|
|
|
-grid-search takes exponentially growing sequences for each parameter, and
|
|
|
-checks for each combination of values what the score is. The combination with
|
|
|
-the highest score is then used as our parameters, and the entire SVM will be
|
|
|
-trained using those parameters.\\
|
|
|
-\\
|
|
|
-We found that the best values for these parameters are $c = ?$ and
|
|
|
-$\gamma = ?$.
|
|
|
+combination of values. To do this, we perform a so-called grid-search. A grid-
|
|
|
+search takes exponentially growing sequences for each parameter, and checks for
|
|
|
+each combination of values what the score is. The combination with the highest
|
|
|
+score is then used as our parameters, and the entire SVM will be trained using
|
|
|
+those parameters.
|
|
|
+
|
|
|
+We found that the best values for these parameters are $c = ?$ and $\gamma = ?$.
|
|
|
+
|
|
|
|
|
|
\section{Results}
|
|
|
|
|
|
-The goal was to find out two things with this research: The speed of the
|
|
|
-classification and the accuracy. In this section we will show our findings.
|
|
|
|
|
|
\subsection{Speed}
|
|
|
|
|
|
@@ -374,55 +375,65 @@ Recognizing license plates is something that has to be done fast, since there
|
|
|
can be a lot of cars passing a camera in a short time, especially on a highway.
|
|
|
Therefore, we measured how well our program performed in terms of speed. We
|
|
|
measure the time used to classify a license plate, not the training of the
|
|
|
-dataset, since that can be done offline, and speed is not a primary necessity
|
|
|
-there.\\
|
|
|
-\\
|
|
|
-The speed of a classification turned out to be blablabla.
|
|
|
+dataset, since that can be done off-line, and speed is not a primary necessity
|
|
|
+there.
|
|
|
+
|
|
|
+The speed of a classification turned out to be ???.
|
|
|
+
|
|
|
|
|
|
\subsection{Accuracy}
|
|
|
|
|
|
Of course, it is vital that the recognition of a license plate is correct,
|
|
|
almost correct is not good enough here. Therefore, we have to get the highest
|
|
|
-accuracy score we possibly can.\\
|
|
|
-\\ According to Wikipedia
|
|
|
-\footnote{
|
|
|
+accuracy score we possibly can.
|
|
|
+
|
|
|
+According to Wikipedia \footnote{
|
|
|
\url{http://en.wikipedia.org/wiki/Automatic_number_plate_recognition}},
|
|
|
commercial license plate recognition software score about $90\%$ to $94\%$,
|
|
|
-under optimal conditions and with modern equipment. Our program scores an
|
|
|
-average of blablabla.
|
|
|
+under optimal conditions and with modern equipment.
|
|
|
|
|
|
-\section{Difficulties}
|
|
|
+Our program scores an average of ???.
|
|
|
|
|
|
-During the implementation and testing of the program, we did encounter a
|
|
|
-number of difficulties. In this section we will state what these difficulties
|
|
|
-were and whether we were able to find a proper solution for them.
|
|
|
|
|
|
-\subsection*{Dataset}
|
|
|
+\section{Conclusion}
|
|
|
+
|
|
|
+It turns out that using Local Binary Patterns is a promising technique for
|
|
|
+License Plate Recognition. It seems to be relatively insensitive by dirty
|
|
|
+license plates and different fonts on these plates.
|
|
|
+
|
|
|
+The performance speed wise is ???
|
|
|
+
|
|
|
+
|
|
|
+\section{Reflection}
|
|
|
+
|
|
|
+
|
|
|
+\subsection{Dataset}
|
|
|
|
|
|
-We did experience a number of problems with the provided dataset. A number of
|
|
|
-these are problems to be expected in a real world problem, but which make
|
|
|
-development harder. Others are more elemental problems.\\
|
|
|
The first problem was that the dataset contains a lot of license plates which
|
|
|
are problematic to read, due to excessive amounts of dirt on them. Of course,
|
|
|
-this is something you would encounter in the real situation, but it made it
|
|
|
-hard for us to see whether there was a coding error or just a bad example.\\
|
|
|
-Another problem was that there were license plates of several countries in
|
|
|
-the dataset. Each of these countries has it own font, which also makes it
|
|
|
-hard to identify these plates, unless there are a lot of these plates in the
|
|
|
-learning set.\\
|
|
|
+this is something you would encounter in the real situation, but it made it hard
|
|
|
+for us to see whether there was a coding error or just a bad example.
|
|
|
+
|
|
|
+Another problem was that there were license plates of several countries in the
|
|
|
+dataset. Each of these countries has it own font, which also makes it hard to
|
|
|
+identify these plates, unless there are a lot of these plates in the learning
|
|
|
+set.
|
|
|
+
|
|
|
A problem that is more elemental is that some of the characters in the dataset
|
|
|
are not properly classified. This is of course very problematic, both for
|
|
|
training the SVM as for checking the performance. This meant we had to check
|
|
|
each character whether its description was correct.
|
|
|
|
|
|
-\subsection*{SVM}
|
|
|
+
|
|
|
+\subsection{SVM}
|
|
|
|
|
|
We also had trouble with the SVM for Python. The standard Python SVM, libsvm,
|
|
|
had a poor documentation. There was no explanation what so ever on which
|
|
|
parameter had to be what. This made it a lot harder for us to see what went
|
|
|
wrong in the program.
|
|
|
|
|
|
-\section{Workload distribution}
|
|
|
+
|
|
|
+\subsection{Workload distribution}
|
|
|
|
|
|
The first two weeks were team based. Basically the LBP algorithm could be
|
|
|
implemented in the first hour, while some talked and someone did the typing.
|
|
|
@@ -430,28 +441,21 @@ Some additional 'basics' where created in similar fashion. This ensured that
|
|
|
every team member was up-to-date and could start figuring out which part of the
|
|
|
implementation was most suited to be done by one individually or in a pair.
|
|
|
|
|
|
-\subsection{Who did what}
|
|
|
-Gijs created the basic classes we could use and helped the rest everyone by
|
|
|
-keeping track of what required to be finished and whom was working on what.
|
|
|
+Gijs created the basic classes we could use and helped the rest everyone by
|
|
|
+keeping track of what required to be finished and whom was working on what.
|
|
|
Tadde\"us and Jayke were mostly working on the SVM and all kinds of tests
|
|
|
whether the histograms were matching and alike. Fabi\"en created the functions
|
|
|
-to read and parse the given xml files with information about the license
|
|
|
-plates. Upon completion all kinds of learning and data sets could be created.
|
|
|
-
|
|
|
-%Richard je moet even toevoegen wat je hebt gedaan :P:P
|
|
|
-%maar miss is dit hele ding wel overbodig Ik dacht dat Rein het zei tijdens
|
|
|
-%gesprek van ik wil weten hoe het ging enzo.
|
|
|
+to read and parse the given xml files with information about the license plates.
|
|
|
+Upon completion all kinds of learning and data sets could be created.
|
|
|
|
|
|
-\subsection{How it went}
|
|
|
+%Richard je moet even toevoegen wat je hebt gedaan :P:P maar miss is dit hele
|
|
|
+%ding wel overbodig Ik dacht dat Rein het zei tijdens gesprek van ik wil weten
|
|
|
+%hoe het ging enzo.
|
|
|
|
|
|
Sometimes one cannot hear the alarm bell and wake up properly. This however was
|
|
|
-not a big problem as no one was affraid of staying at Science Park a bit longer
|
|
|
-to help out. Further communication usually went through e-mails and replies
|
|
|
-were instantaneous! A crew to remember.
|
|
|
-
|
|
|
-\section{Conclusion}
|
|
|
-
|
|
|
-Awesome
|
|
|
+not a big problem as no one was afraid of staying at Science Park a bit longer
|
|
|
+to help out. Further communication usually went through e-mails and replies were
|
|
|
+instantaneous! A crew to remember.
|
|
|
|
|
|
|
|
|
\end{document}
|

{kind=link}